
Logistic Equation version 2: Solve a first-order ODE
This is part 2 in a series introducing the ode45 solver for integrating the logistic equation, a first-order ODE:


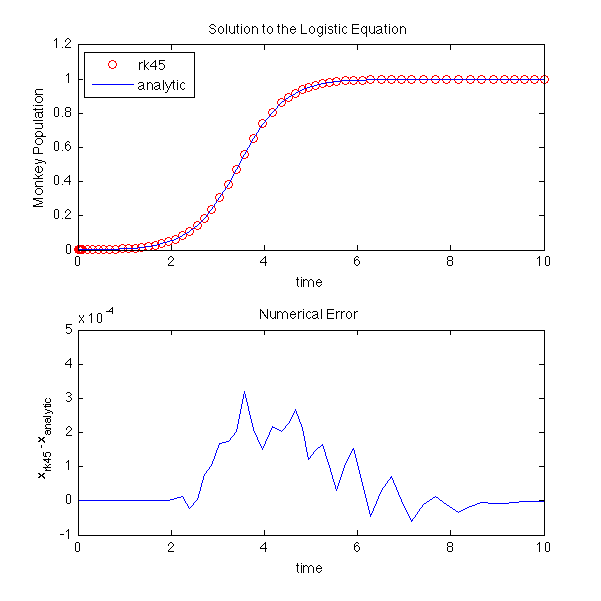
The plot below shows how the numerical error changes with time. Notice that the error is large where the value of x undergoes rapid changes. In this example, the relative tolerance (defined below) is set to 1e-3. The maximum value of the actual error is consistent with this value, although that is not always guaranteed (your mileage may vary...).
% logisticV2.m % % Numerically integrate a 1D ODE (the Logistic Equation) using the % Runge-Kutta 45 solver and and compare the result to the analytic solution % function logisticV2 a = 2; % free parameter tBegin = 0; % time begin tEnd = 10; % time end x0 = 0.001; % initial position % Use the Runge-Kutta 45 solver to solve the ODE % Set relative and absolute tolerances options = odeset('RelTol', 1e-3, 'AbsTol', 1e-6); [t,x] = ode45(@derivatives, [tBegin tEnd], x0, options); % Analytic Solution x2 = x0 ./ ((1-x0) * exp(-a*t) + x0); %%%%% top plot: solutions subplot(2,1,1) % top plot plot(t,x,'ro'); % plot ode45 solution as red circles hold on % superimpose next plot on previous plot(t,x2,'b-'); % plot analytic solution as blue line ylim([0 1.2]); % set y plot limits title('Solution to the Logistic Equation'); % title xlabel('time'); % label x axis ylabel('Monkey Population'); % label y axis legend('rk45', 'analytic', 'Location', 'Northwest') % legend top left %%%%% lower plot: error subplot(2,1,2) % lower plot plot(t,x-x2,'b-') % plot error as blue line title('Numerical Error'); % Title xlabel('time'); % label x axis ylabel('x_{rk45}-x_{analytic}'); % label y axis % print to pdf set(gcf, 'PaperSize', [6 6]); set(gcf, 'PaperPosition', [0 0 6 6]); print ('-dpdf','logisticV2.pdf'); print ('-dpng','logisticV2.png','-r100'); %%%%% Function: derivatives % returns the derivative dx/dt for the logistic equation % uses the parameter a from main program, but changeth it not function dxdt = derivatives(t,x) dxdt = a * x * (1 - x); end end
Monkey Commentary
In version 2 of the code, we set the relative and absolute tolerances through the options:
options = odeset('RelTol', 1e-3, 'AbsTol', 1e-6);
[t,x] = ode45(@derivatives, [tBegin tEnd], x0, options); It is important to understand that these tolerances are not with respect to the actual solution (we usually do not know the actual solution). Rather, the ode45 routine calculates the values using both 4th order and (presumably more accurate) 5th order Runge-Kutta methods. The tolerance specifies how much these two estimates of the true solution can differ. The ode45 routine keeps reducing the time step until the difference between the 4th and 5th order solutions fall within the specified tolerance range. Thus, reducing the tolerances usually produces a more accurate solution (but not always).
Generally speaking, the absolute tolerance controls the time step when the solution is close to zero, and the relative tolerance controls it when the solution is far from zero.
RelTol is a measure of the error relative to the size of each solution component. Roughly, it controls the number of correct digits in all solution components, except those smaller than the AbsTol threshhold. The default value, 1e-3, corresponds to 0.1% accuracy. The relative tolerance between two numbers X and Y is defined as

We recommend monkeying around with the tolerance values to see how they affect the resulting errors in this example.